- 図形の回転と回転行列 ユークリッド空間において図形を回転させる時、座標値(座標ベクトル)に回転行列をかけることにより回転変換することができる
- 2次元の回転行列 \[ R(\theta)= \begin{bmatrix} \cos \theta & -\sin \theta \\ \sin \theta & \cos \theta \\ \end{bmatrix} \]
- 2次元の回転行列を使った回転変換
\[
\begin{bmatrix}
x' \\
y'
\end{bmatrix}
=
\begin{bmatrix}
\cos \theta & -\sin \theta \\
\sin \theta & \cos \theta \\
\end{bmatrix}
\begin{bmatrix}
x\\
y
\end{bmatrix}
\]
すなわち
\[
x' = x \cos \theta - y \sin \theta
\]
\[
y' = x \sin \theta + y \cos \theta
\]
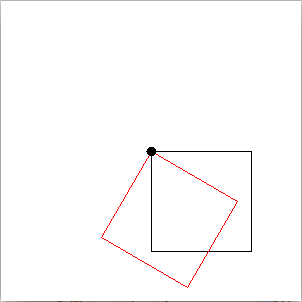 原点(黒丸)を中心に正方形(黒)を正方向(時計回り)にコード
原点(黒丸)を中心に正方形(黒)を正方向(時計回り)にコード
30度の回転変換を施した結果(赤)
※コンピュータスクリーンの座標系はY座標が下向きが正になっているので、
通常の座標系と逆向きになることに注意
GIFイメージ
サンプルコード//30度正方向(時計回り)に回転 theta=30*Math.PI/180; rx=x*Math.cos(theta)-y*Math.sin(theta); ry=x*Math.sin(theta)+y*Math.cos(theta); - 3次元の回転行列 x軸回転 \[ R_x(\theta)= \begin{bmatrix} 1 & 0 & 0 \\ 0 & \cos \theta & -\sin \theta \\ 0 & \sin \theta & \cos \theta \\ \end{bmatrix} \] y軸回転 \[ R_y(\theta)= \begin{bmatrix} \cos \theta & 0 & \sin \theta \\ 0 & 1 & 0 \\ - \sin \theta & 0 & \cos \theta \\ \end{bmatrix} \] z軸回転 \[ R_z(\theta)= \begin{bmatrix} \cos \theta & - \sin \theta & 0 \\ \sin \theta & \cos \theta & 0 \\ 0 & 0 & 1 \end{bmatrix} \]
- 3次元の回転行列を使った回転変換
- x軸回転 \[ \begin{bmatrix} x' \\ y' \\ z' \end{bmatrix} = \begin{bmatrix} 1 & 0 & 0 \\ 0 & \cos \theta & -\sin \theta \\ 0 & \sin \theta & \cos \theta \\ \end{bmatrix} \begin{bmatrix} x \\ y \\ z \end{bmatrix} \] すなわち \[ x' = x \] \[ y' = y \cos \theta - z \sin \theta \] \[ z' = y \sin \theta + z \cos \theta \]
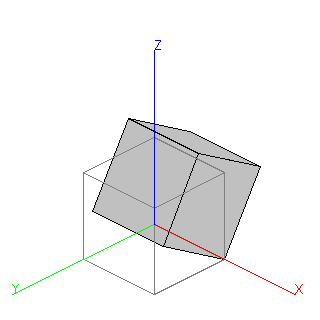
X軸(赤)を中心に立方体を正方向(+Xから見て時計回り)に
30度の回転変換を施した結果(グレー)
※コンピュータスクリーンの座標系はY座標が下向きが正になっているので、
通常の座標系と逆向きになることに注意
GIFイメージ
コード
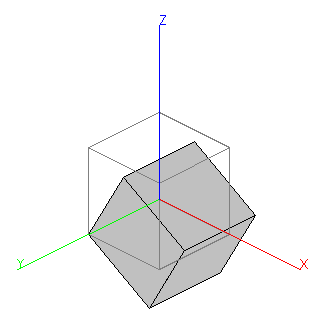
30度の回転変換を施した結果(グレー)
※コンピュータスクリーンの座標系はY座標が下向きが正になっているので、
通常の座標系と逆向きになることに注意
GIFイメージ
{kind=link}
{kind=link}
{kind=link}
{kind=link}